摘要: 脉冲神经网络(Spiking Neural Networks,SNN)是一类受大脑神经机理启发的模型,可在神经形态硬件上以低能耗实现。然而,现有的直接训练方法通常将 SNN 限定在固定的时间步长下运行。这种“时间步长刚性”带来两大问题:1)难以在无需时钟的全事件驱动芯片上部署;2)无法根据动态推理时间步长在能耗与性能之间灵活取舍。本研究首先验证了训练在多种时间步长下均能泛化的 SNN 的可行性;随后提出了一种提升时间灵活性的全新方法——混合时间步长训练(Mixed Time-step Training, MTT)。在 MTT 的每一次迭代中,我们为网络的不同阶段随机分配时间步长,并通过通信模块在各阶段间传递脉冲。训练完成后,权重可直接用于带时钟驱动或纯事件驱动的平台。实验表明,MTT 训练的模型具有显著的时间灵活性:1. 在事件驱动与时钟驱动两类部署场景下均表现友好——在 N-MNIST 上几乎无损失,在 CIFAR10-DVS 上相较标准方法精度提升 10.1%;2. 提升了网络的泛化能力,接近当前最佳水平(SOTA)。据我们所知,这是首次报道大规模 SNN 在全事件驱动场景下部署并取得优异结果的工作。代码已开放,地址:https://github.com/brain-intelligence-lab/temporal_flexibility_in_SNN
1. Intro
之前的训练方法经常遇到问题:在固定的T上做训练,导致得到的SNN只在这个T上表现好,而对其他的T表现很差,导致:
- 无法灵活调整Timestep做elastic inference
- 在fully event driven chip上部署会有问题,因为在这种无时钟的芯片上根本就没有timestep这种概念
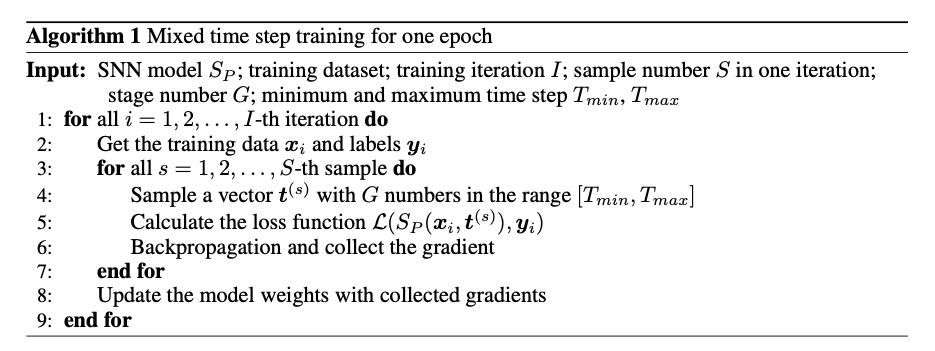
为了解决这个问题提出以下流程:
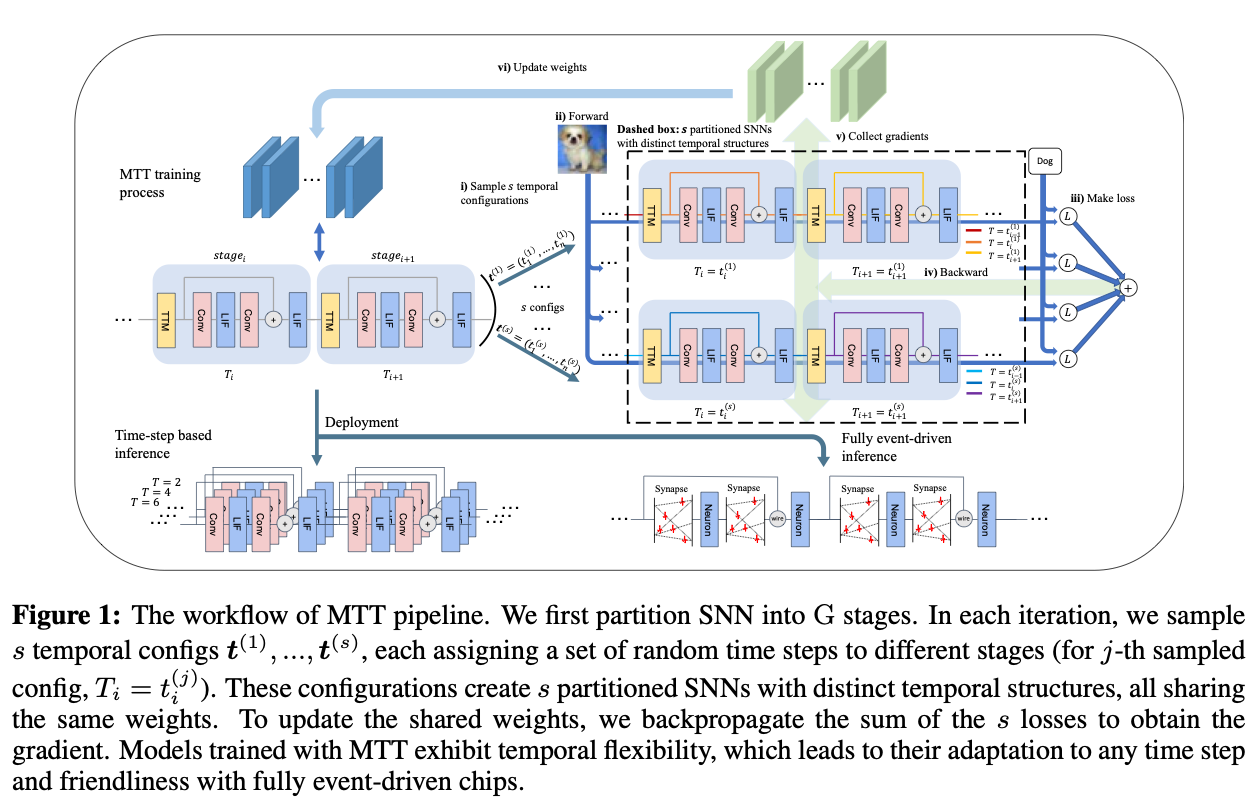
- 把SNN划分为G个阶段
- 每个epoch中,抽取s个Timestep设置,给不同的阶段配置不同的timestep
- 将个子网络共享权重,训练的时候把loss求和然后反传,更新共享权重
2. Related Work
Direct Training, Conversion, Dynamic Inference Time Step, Fully Event-driven Neuromorphic Chips,基本讲的就是那几个东西了。
3. Preliminaries
3.1. Spiking Neuron Model
LIF
3.2. Time-stepped Simulation, Clock-driven LIF/IF Model And Hardware
文章中的。
3.3. Event-based Simulation, Event-driven LIF/IF Model And Hardware
这种连续形式很难训练,基本上是timestep训练然后期待基于事件能推理。
3.4. Surrogate Gradient
4. Methodology
4.1. Identifying Temporal Inflexibility and Potential Solution
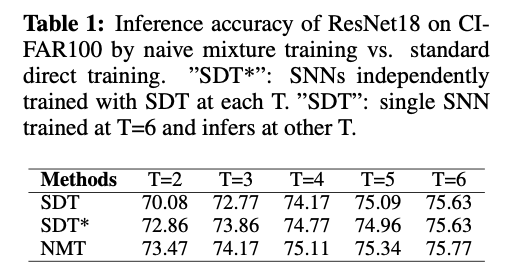
为展示该局限,我们用 ResNet-18 在 CIFAR-100 数据集上做实验。先在 T = 6 训练一套 SNN,然后在 5 个不同时间步上测试其准确率(Tab. 1 中 “SDT”)。现实部署往往与训练用的时间结构不同——例如全事件驱动芯片本身没有显式时间步;又如时钟驱动系统可能为了能耗-性能折衷而动态调整 T。时间刚性会阻碍模型在部署端的泛化。 为缓解时间刚性,我们提出一个直观的方法:朴素混合训练(Naive Mixture Training,NMT) :每次迭代从预设集合 {1, 2, … , 6} 随机抽 3 个时间步,依次做 3 次前向,最后一次性反传更新参数。Tab. 1 显示,单一 NMT 模型已能达到分别用 SDT 在各 T 上训练(标记为 SDT*)的水准,说明 NMT 有效削弱了时间刚性,使模型跨时间步具备时间灵活性(temporal flexibility) 。
4.2. Analysis on Naive Mixture Training
- Temporal Flexibility: SDT 只在单一 T 上优化,容易过拟合该时间结构;NMT 同时训练 6 种结构,迫使网络学会在不同 T 上保持性能。
- Event-driven Friendliness: 事件驱动可看作 “T → ∞” 的极限。NMT 训练出的网络已对多 T 稳定,更易迁移到真正的全事件芯片。
- Network Generalization: 迭代中随机切换 T 类似于一种新的 dropout;若梯度把模型从局部极小拉出,最终收敛到更平坦的极小域,因而在小 T 时尤显著提升。
4.3. Mixed Timestep Training
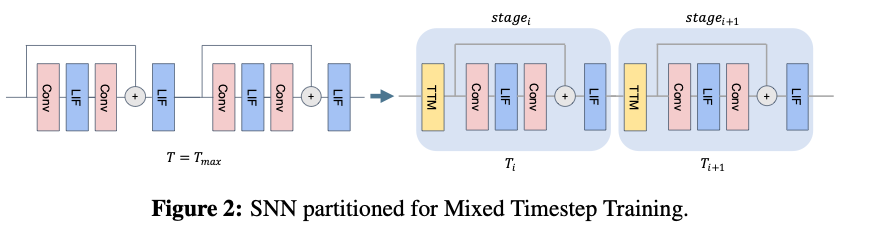
4.3.1. Network Partitioning
将网络划分成个阶段,一次前向推理总共耗时
4.3.2. Temporal Transformation Module
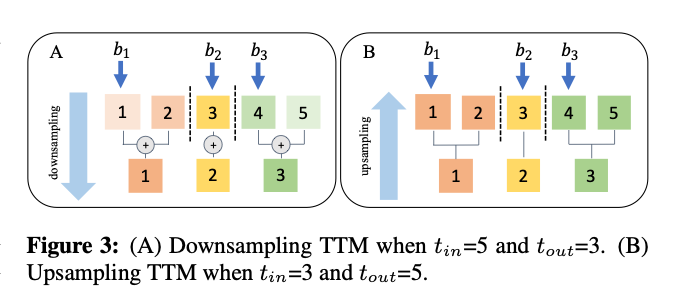
因为网络被划分之后每个模块的timestep可能不同,因此需要用一个额外的模块对齐。downsampling的时候类似pooling,upsampling的时候采用:
4.3.3. Mixed Timestep Training
但组合空间过大,实际在每次迭代随机采样s 个,累加损失后反传。
这样训BN的波动太大容易掉点,所以直接用的统计量处理BN。
4.4. Tests on Fully Event-driven Scenarios
选用Synsense Speck2e,全事件驱动、超低功耗。芯片规模有限,无法容纳大 backbone,于是编写了并行事件驱动模拟器,在小数据集上与真芯片对齐,再用来跑大数据集。
新的指标Spike Difference:
衡量芯片和模拟器的输出差异。
5. Experiments
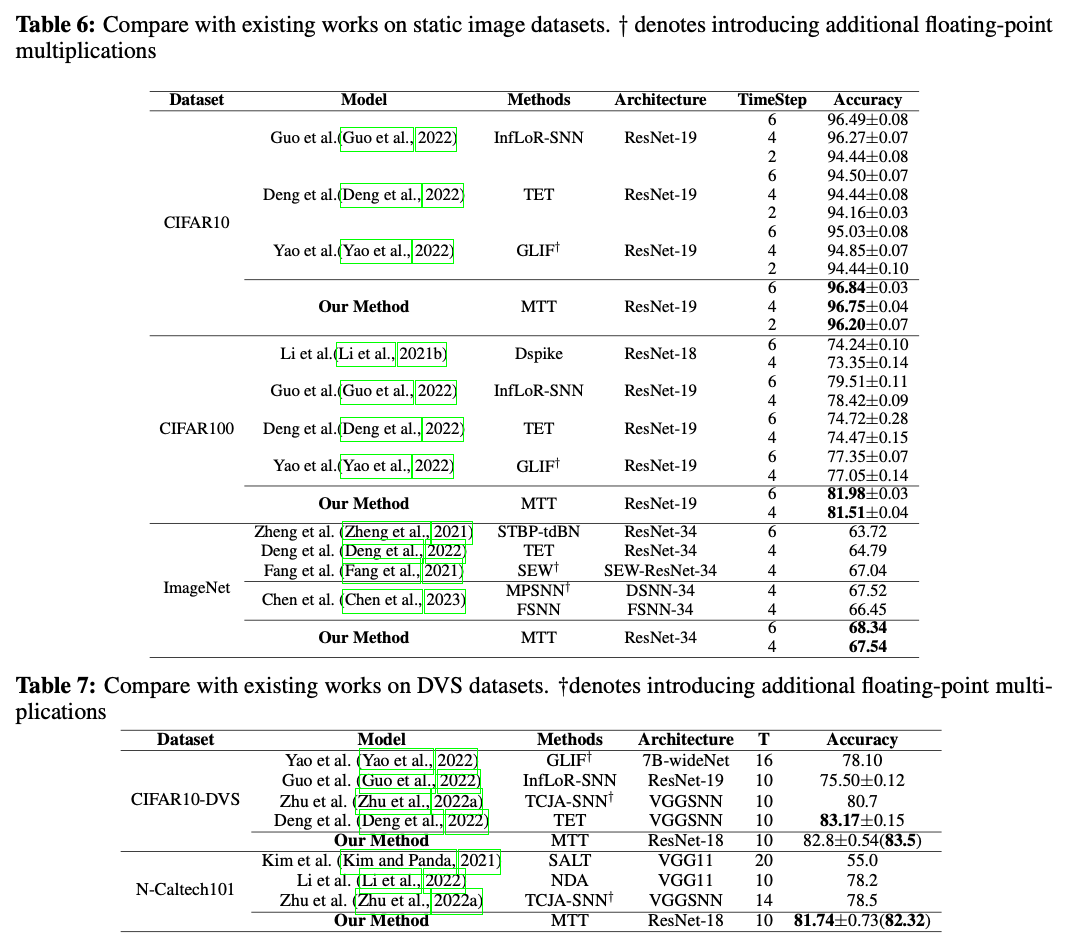
CIFAR10. CIFAR100, ImageNet, CIFAR10-DVS, N-Caltech101。网络结构包括ResNet18, Resnet19, ResNet34, VGG.
5.1. Validation Experiments
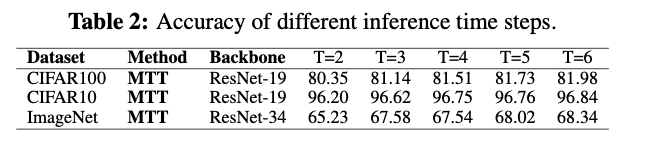
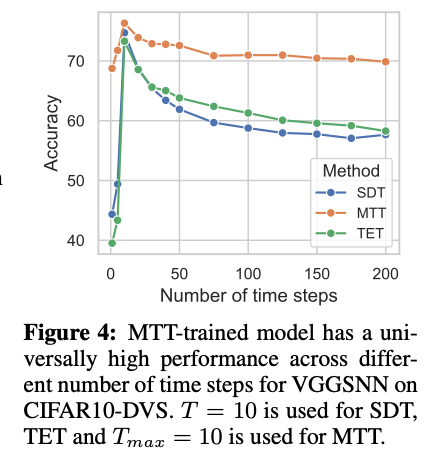
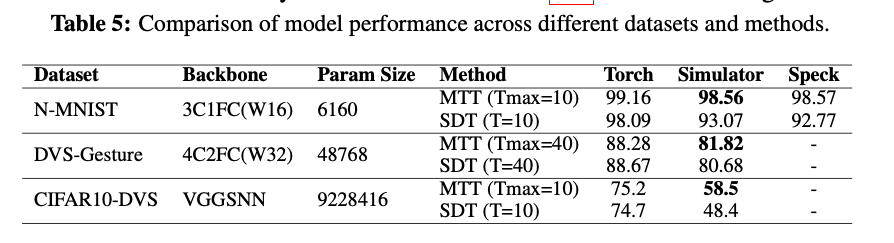
Temporal Flexibility Across Time Steps,实验证明掉点少,尤其是DVS这样的数据,配合early stop。
Event-driven Friendliness, 在MNIST跑的,发现如果用Clock-driven训练出来的模型,评估得到的spike数量和在芯片上跑的spike数量相差30%,而使用MTT训练出来的模型在模拟器上跑和在芯片上跑的spike数量只相差3%。
由于面向芯片部署,模型不含偏置;Speck 等全事件芯片省去了逐时间步加偏置等操作,极致节能,适合“永远在线”场景。
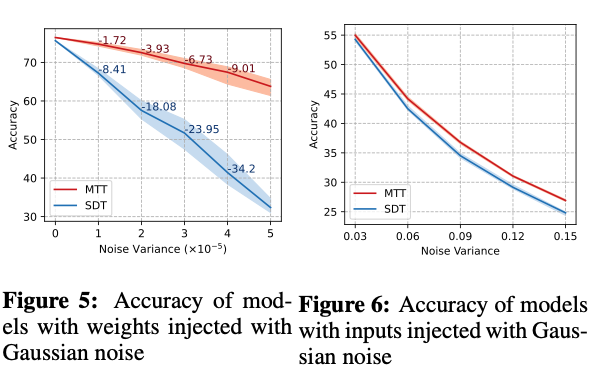
做adversary attack更加稳定。
5.2. Ablation Study

MTT 相较 NMT 的核心改进是把网络划分为时间步不同的多个阶段。我们在 CIFAR-100 上以 ResNet-18 为例,验证分段粒度的作用。定义粒度常数 g 为“每个阶段包含的残差块数”。在 ResNet-18 中共有 8 个块,因此 NMT 可视为 g=8 的特殊情况。实验分别以 g=1,2,4,8 训练四个 MTT-SNN,并用 SDT 训练一组对照;然后在 T=2,3,4,5,6 上测试准确率。结果:随着 g 减小(阶段数增多,时间结构更丰富),整体性能稳步提升,验证了网络分段的有效性。
6. Conclusion
本文首先指出了主流 SNN 训练范式隐含的副作用——“时间刚性” :GPU 上训练的模型在部署到神经形态硬件时,若时间结构不一致,性能会大幅下降。针对这一痛点,我们提出了混合时间步训练(MTT) :
- 通过“网络分段 + 随机时间步配置”在训练阶段引入多样化的时间结构;
- 显著提升模型的时间灵活性 与事件驱动兼容性 ;
- 在 GPU、真实芯片(Synsense Speck)和事件驱动模拟器的大量实验中验证其有效性;
- 同时保持与最先进方法相当的准确率。
MTT 的思想还能迁移到其他训练场景,例如随机累积输入帧或在在线学习中动态调整时间步。我们相信,MTT 为“几乎零损失”的事件驱动部署指明了方向,也期待它能激发更多针对 SNN 部署问题的研究。
讲了Elastic Inference的问题,虽然做的方法有点神秘。感觉大家逐渐意识到SNN具有的一些ANN没有的特性了。