摘要: 我们探讨了进化策略(ES)的使用,这是一类黑箱优化算法,作为流行的基于MDP的强化学习技术(如Q学习和策略梯度)的替代方案。在MuJoCo和Atari上的实验表明,ES是一种可行的解决策略,并且在可用CPU数量上具有极好的扩展性:通过使用一种基于公共随机数的新型通信策略,我们的ES实现只需要传递标量,使其能够扩展到超过一千个并行工作者。这使我们能够在10分钟内解决3D人形步态问题,并在经过一个小时的训练后,在大多数Atari游戏中获得竞争力结果。此外,我们强调了ES作为黑箱优化技术的几个优点:它对动作频率和延迟奖励不变,对极长时间范围具有容忍性,并且不需要时间折扣或价值函数近似。
1. Intro
强化学习中,除了给予马尔可夫链的RL方法,还有一类基于Black-Box Optimization的方法,在RL中通常称为“Direct Policy Search”直接策略搜索或者“Neuron Evolution”神经演化。
Contributions:
- 本文发现用Virtual Batch Normalization等各种重参数化的方法可以显著提高Evolution Strategy的稳定性;
- Evolution Strategy具有高度并行性;
- Evolution Strategy的数据利用率略逊于基于梯度的方法,但是不需要反向传播和reward function,计算量大幅度减少了;
- Evolution Strategy学习到的数据的多样性相比于基于梯度的方法更加丰富;
- Evolution Strategy具有很高的稳定性;
2. Evolution Strategy
ES是一类黑箱优化算法,每次迭代对一个参数向量种群进行扰动,评估目标函数,然后将得分最高的若干个个体进行重组,形成下一代群众,直到目标函数被充分优化。
Formulation:记是作用在参数上的目标函数,Natural Evolution Strategy用另一个参数向量来表示一个分布,然后对期望做随机梯度上升,不断改进,具体来说:
方法类似REINFORCE中的“score function”。
REINFORCE梯度:考虑轨迹有Reward,策略给出动作分布,希望最大化
则
环境转移项直接忽略,则有:
假设是一个factored Gaussian,这个梯度估计也被称为同时扰动随机近似(simultaneous perturbation stochastic approximation)或者参数探索策略梯度(parameter-exploring policy gradients),以及零阶梯度估计(zero-order gradient estimation)。
本文中主要关注强化学习的场景被看作是环境提供的return,是一个策略的参数。考虑到不能保证环境的梯度可导,为了保证可微性,令:
其中为固定协方差。换而言之,原目标已经经过了一次高斯模糊,摆脱了原环境中可能的不可微的性质。在此定义下,进一步改写:
然后进行采样:

2.1. Scaling and parallelizing ES
ES很适合做并行,因为:
- ES计算是一个episode一个episode做的,episode内部不存在通信,通信很少;
- 每个node只需要在每个episode传递一个scalar:考虑seed固定,则中可以自己算,只有需要从别的机器传过来;
- 没有reward function,不需要迭代更新跟当前的policy保持一致;
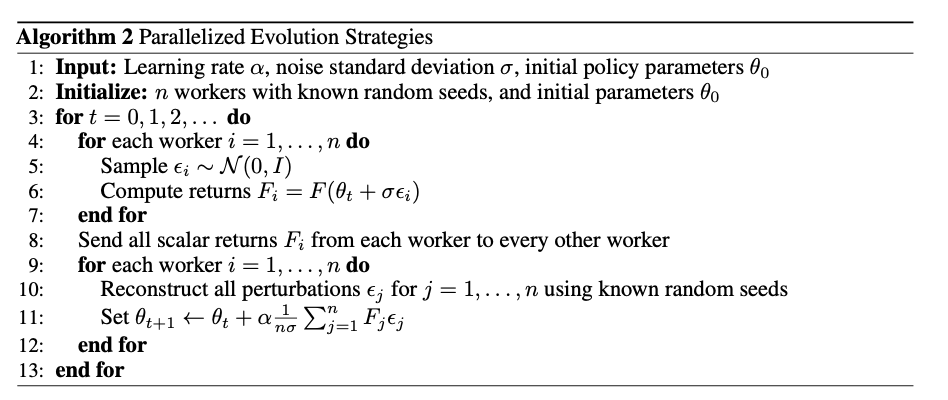
实践中,我们通常让每个节点在训练开始时各自实例化一大块高斯噪声,然后在每次迭代时从其中选取相应的子块来对参数进行扰动。这样虽然在严格意义上不同迭代间的扰动不是完全独立的,但实验中并未观察到什么不良影响。 为了减小方差,我们采用对称采样(antithetic sampling),也称为镜像采样(mirrored sampling),即同时评估一对噪声向量 和 。我们还对回报值进行排序变换(rank transformation)来实现”适应度整形”(fitness shaping):用回报的排序替代原始标量回报,这样可以降低离群值的影响,并减少训练早期陷入局部最优的可能性。此外,我们在策略参数上使用权重衰减(weight decay)来防止参数量级膨胀。与 Rank Transformation文献的发现不同,我们在实验中并未观察到自适应噪声 带来明显优势,因此将其作为固定超参数使用。
2.2. The impact of network parameterization
在 ES 中,探索是通过对策略参数 θ\thetaθ 做随机扰动来实现的。而像 Q-learning 和策略梯度那样的传统方法,一般是通过在动作层面进行随机采样来实现探索。对 ES 而言,若高斯扰动不够有效地改变策略的行为,就无法形成有效的性能差异,进而无从更新。 在 Atari 游戏实验中,我们发现,对 DeepMind 提出的卷积网络结构直接加上随机参数扰动,往往不足以产生有效的探索:有些环境里,扰动导致的策略几乎只会一直采取同一动作,无法收集足够多的奖励。我们通过在策略中使用虚拟批归一化(virtual batch normalization),解决了大多数 Atari 游戏面临的这个问题。虚拟批归一化与批归一化(batch normalization)类似,区别在于其所用的“批”在训练开始时就固定不变。这样做在训练早期(当随机初始化的策略参数尚未充分拟合时),网络对输入图像的微小变化会更敏感,从而更容易在动作层面产生多样性。但对大多数场景而言,虚拟批归一化会增加一定的计算成本;然而在我们环境中,每回合需要的环境交互通常比一次前向运算要多很多步,因而这点额外开销基本可忽略。
3. Smoothing in parameter space versus smoothing in action space
如前所述,强化学习的主要困难之一在于目标函数梯度的缺失或难以获取:环境或策略可能是离散的、不光滑的,或者只能通过抽样获取高方差的估计。在最一般情况下,假设我们有一个决策问题,采取一序列动作 ,得到回报 ,其中 来自一个确定性或随机的策略。我们要优化的是
由于动作可以是离散的,策略也可以是确定性的,可能在上不光滑,更重要的是,环境的状态转移函数无法直接对我们开放,导致无法通过类似反向传播的方法来直接计算的梯度。
要让这个问题可微、且能找到其梯度的方式之一,就是在策略或参数中人工添加噪声。策略梯度方法 通常在动作空间加噪声,即令动作分布依赖于某种概率模型:例如在离散动作情形下,通过对策略打分做 softmax 来进行采样。这样做可得新的目标函数:
和梯度估计:
ES在参数空间加噪声,令扰动为,执行对应的动作,可以也可以看作将做高斯平滑:
和梯度估计:
3.1. When is ES better than policy gradients?
其方差大致可表示为:
若两种方法所做的探索程度相近,差不多,区别在后面一项。对于Policy Gradients,,个不相关项之和,方差和近似线性增加;ES中和无关,因此ES适合在回合长度比较大的时候。而策略梯度为了对抗这个问题,通常会使用折扣奖励,或者利用价值函数逼近,以期降低高方差。但折扣奖励在长时序的情况下会带来偏差;价值函数逼近虽然有效,但也会引入相应的估计误差。相较而言,如果一个任务具有超长时序、延迟奖励且难以找到好的价值函数,则 ES 可能是更具吸引力的选择。
3.2. Problem dimensionality
从有限差分的方式解读ES。当足够小的时候,考虑,定义平滑后的目标,有,则
且
(p是高斯分布)带回有:
把做一阶泰勒展开有:
带入前面的式子有:
然后除以就是梯度+,总结有:
就是对的随机有限差分估计。
有限差分在高维空间的复杂度随着维度增加,但是实际上这个维度是优化的难度,不是NN中的参数量。在实验中,我们发现,当网络结构更大时,ES 的表现往往更好。例如在 Atari 任务中,与 A3C 一样,我们也尝试了较小和较大两种卷积网络,发现较大网络反而在 ES 下收敛得更好。我们推测这与梯度优化大网络更容易找到平滑的局部极小点类似。
3.3. Advantages of not calculating gradients
除了并行效率以及对长时序任务的适应性外,类似 ES 这样的黑箱优化还具备以下优势:
- 通信开销低 :分布式实现时仅需在节点间传递标量,而基于梯度的方法则需传递完整梯度。
- 对极端稀疏/延迟奖励的适应 :ES 只需关注整条回合的总回报,不受奖励频度或时序的影响。
- 计算量更小 :ES 无需反向传播和价值函数训练,大幅降低每回合的计算开销。
- 不存在梯度爆炸问题 :相比可能出现梯度爆炸的传统方法,ES 通过参数扰动的平滑性避免了这类极端情况。此外,ES 更容易整合硬注意力(hard attention)等不可微模块。
- 适应低精度运算 :在二值网络(binary neural networks)等低精度模型中,ES 不会出现梯度估计偏差问题。由于只需前向推理,ES 可在 TPU 等专注推理的硬件上运行。
- 对动作频率不敏感 :策略梯度需要精确调节 frame-skip——过高会损失细节控制能力,过低则引发长时序问题。而 ES 在参数空间引入噪声,策略在回合整体层面探索,无需考虑具体动作频率。这一特性使 ES 在需要分层(hierarchy)策略的任务中可能具有独特优势。
4. Experiments
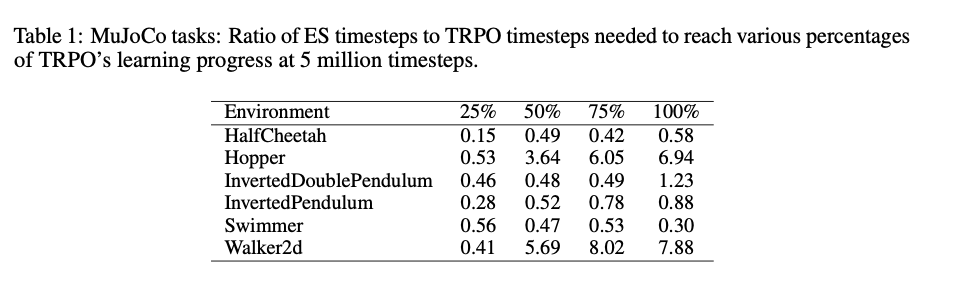
4.1. MuJoCo
4.2. Atari
4.3. Parallelization

4.4. Invariance to temporal resolution

5. Related work
我们此处的主要贡献在于,展示了在现代分布式计算架构下,经过合理实现的 ES 在最难的一些 RL 环境上能够与主流方法同台竞技,并且在运行效率(Wallclock time)上可能更为有利。
6. Contribution
我们研究了一类黑箱优化算法——演化策略(ES),并将其作为 Q-learning、策略梯度等基于 MDP 的强化学习技术的一种替代选择。通过在 Atari 和 MuJoCo 上的实验,我们发现 ES 拥有一些有趣的优点:对动作频率和延迟奖励不敏感,不需要时间折扣或价值函数近似,而且高度可并行化。虽然其数据效率比一些最优的梯度方法略低,但能通过分布式并行来极大缩短训练时间。
展望未来,我们计划将 ES 应用于那些对于基于 MDP 的 RL 不太合适的场景:例如超长时序、复杂奖励结构的任务,或者需要元学习(meta-learning,learning-to-learn)等扩展。我们相信,在广阔的应用中,黑箱优化仍有许多价值有待挖掘,也希望更多研究能基于我们的结果进一步推动 ES 的发展与应用。